实干、实践、积累、思考、创新。
CSI API编程训练第二课,这次做一个基于虚功原理的伸臂桁架几何优化,主要训练如何通过编程控制SAP2000修改节点位置,自动提交计算分析,并提取构件的内力等。
对于桁架结构,根据虚功原理,结合单位荷载法可知,结构任意一点在指定方向的位移可按以下公式表示:
其中,
根据Baker的研究可知,对于静定桁架结构,各杆件处于等应力状态时,结构杆件是最优的。这个最优说的是,对于给定挠度,当所有杆件均处于等应力状态时,所需结构材料用量最小;或者说对于给定材料用量的结构,当所有杆件均处于等应力状态时,结构挠度最小。
假设各杆件的应力水平均达到同一个值,设为
由上述公式可见,当e一样时,
对于不同的结构,我们可以利用
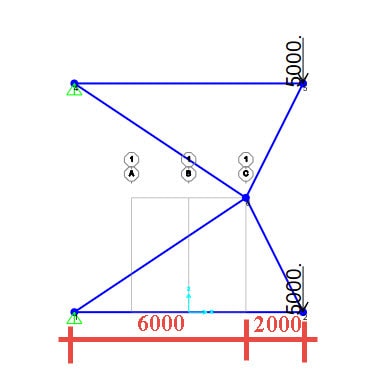
下面我们用一个X型伸臂桁架的几何优化为例进行演示。在SAP2000中进行X型桁架建模,如下图。
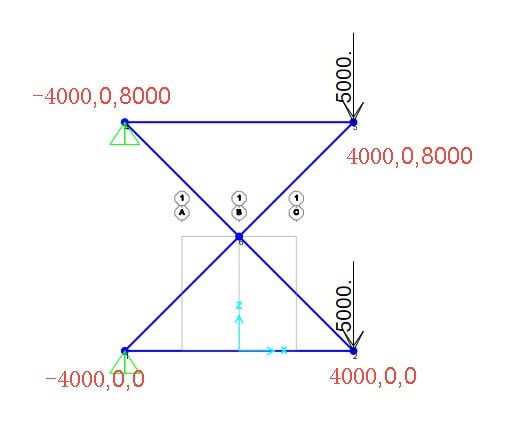
其中X型伸臂桁架的宽、高均为8000,我们通过迭代寻找中间X点的最优位置。
打开小软件,设置控制节点、坐标变化范围、监测点、监测位移和迭代步等参数。
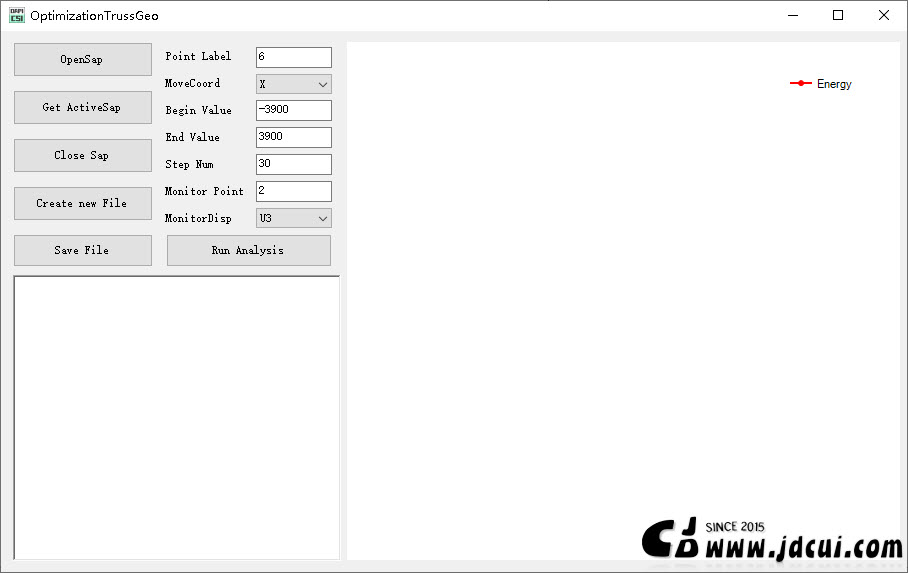
设置好参数后,点击运行分析,软件控制SAP2000进行迭代计算,可以在软件界面看到实时的迭代过程。
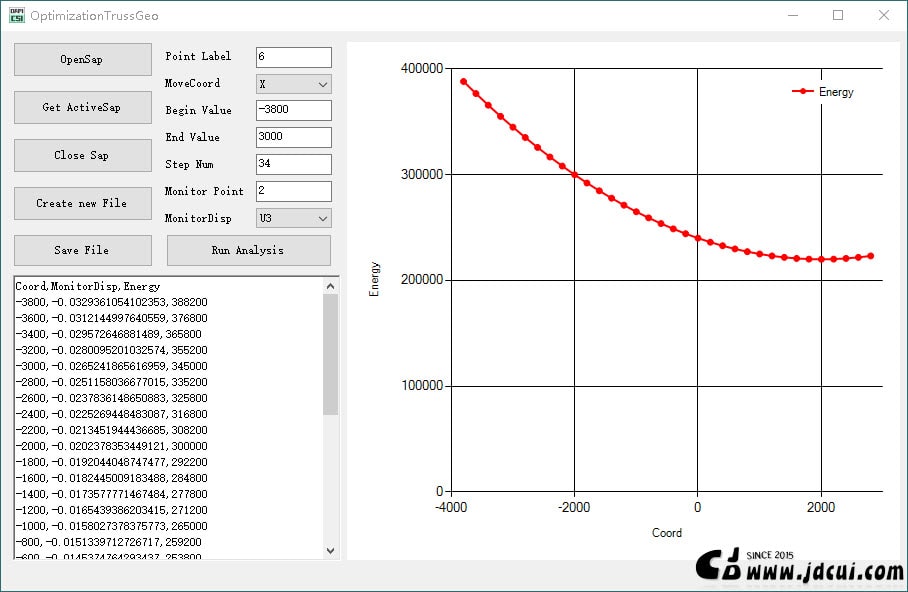
下图是最终分析结果。其中第一个图是迭代坐标和监测点竖向位移的关系,第二个图是迭代坐标和力流
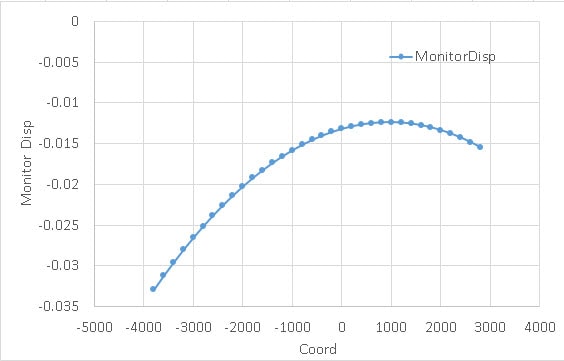
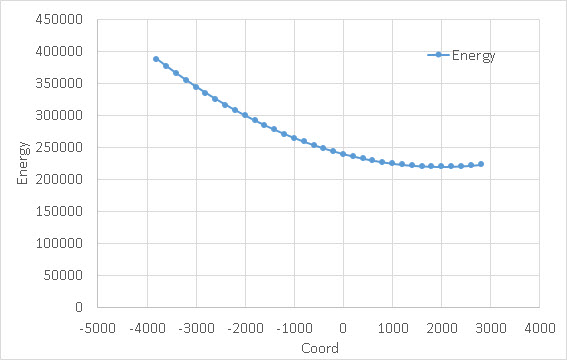
由第一图可以看到,位移最小的X坐标是1000,第二图力流最小的X坐标是2000。
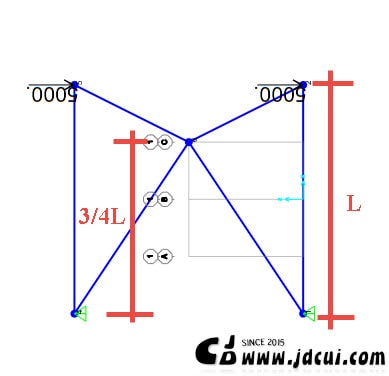
而X=2000才是最优几何构型位置,如下图所示,得到了我们经常看到的3/4位置。
以下是整个软件分析动画。
另外陈学伟博士在 [Dino笔记]伸臂桁架的几何优化方法 中通过Opensees二次开发的方式也做过,大家可以对比看看。
参考文献:
[01] Baker WF. Energy-Based Design of Lateral Systems [J]. Structural Engineering International, 1992, 2:99-102.
[02] Baker WF, Beghini LL, Mazurek A, Carrion J, Beghini A . Maxwell’s reciprocal diagrams and discrete Michell frames [J]. Struct Multidisc Optim. (2013)
- 相关资料 ( Related Topics )
[01] [CSI OAPI][编程] CSI OAPI EX1: 运行/关闭/捕捉 SAP2000 [Start/Exit/GetActive SAP2000]
[02] [CSI OAPI][编程] CSI OAPI EX2: 伸臂桁架几何优化 [Geometric optimization of outrigger truss]
- 微信公众号 ( Wechat Subscription)
 欢迎关注 “
欢迎关注 “