[钢结构][稳定][FEM] 箱型截面压杆的弹性曲屈系数 (Buckling Coefficient of Box-section Column under Axial Compression)
实干、实践、积累、思考、创新。 随后更新… 微信公众号 ( Wechat Subscription) 欢迎关注 “结构之旅” 微信公众号
实干、实践、积累、思考、创新! Tag: 结构工程博士 结构工程师 伪程序员 结构抗震 地震工程 超限设计 软件定制 环评减振 振动控制 减隔震 施工过程模拟 小品钢结构 有限元研发 参数化设计 大震弹塑性

实干、实践、积累、思考、创新。 随后更新… 微信公众号 ( Wechat Subscription) 欢迎关注 “结构之旅” 微信公众号
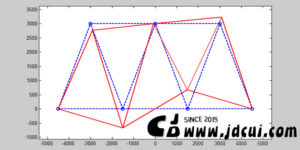
实干、实践、积累、思考、创新。 一道框架屈曲分析例题,例题来源《SAP2000技术指南及工程应用 上册》,例题如下图所示。 框架柱底铰接,柱顶作用竖直向下的集中荷载P。其中E=200GPa,L=6m,I=6.572×10-5m4。据此可以计算对称和反对称失稳的理论屈曲荷载。反对称失稳,屈曲荷载 P =2.104EI/L2=768kN,对称失稳,屈曲荷载P=14.66EI/L2=5353kN。即理想情况下,反对称失稳相对于对称失稳更加容易。原文给出了SAP2000的分析结果。以下分别采用 Midas Gen 及 Abaqus进行该例题的模拟计算。 Midas Gen Model Midas Gen Results (a)一阶屈曲模态(反对称失稳,屈曲因子:768.19,与理论计算结果吻合。) (b)二阶屈曲模态(对称失稳,屈曲因子:5352.72,与理论计算结果吻合。) (c)三阶屈曲模态(屈曲因子:6952.45) Midas2Abaqus Model 为了进行Abaqus分析,采用 Midas2Abaqus 软件进行模型转换,Midas2Abaqus模型如下。在Midas2Abaqus补充设置相关的参数,如工况参数等,即可导出Abaqus INP 模型,用于后续的Abaqus分析。 Abaqus Model Abaqus Results …
坚持实干、坚持一线、坚持积累、坚持思考,坚持创新。 今天是20181231,2018年的最后一天,希望新的一年会更好。
实干、实践、积累、思考、创新。 底部固支的H型钢悬臂柱,顶部竖直向下作用轴压力,分析构件的屈曲模态。为了考虑翼缘或腹板的局部屈曲,可采用壳单元进行建模。本例分别采用Midas Gen及Abaqus软件进行模拟。 Midas Gen Model Midas Gen Results (a)一阶屈曲模态(屈曲因子:8.24E+005)(绕工字钢的弱轴) (b)二阶屈曲模态(屈曲因子:1.976E+006)(绕工字钢的强轴) (c)三阶屈曲模态(屈曲因子:1.976E+006)(绕工字钢轴向扭转) Midas2Abaqus Model 为了进行Abaqus分析,采用Midas2Abaqus软件进行模型转换。 Abaqus Model Abaqus Results (a)一阶屈曲模态(屈曲因子:8.26583E+005)(绕工字钢的弱轴) (b)二阶屈曲模态(屈曲因子:1.98061E+006)(绕工字钢的强轴) (c)三阶屈曲模态(屈曲因子:1.976E+006)(绕工字钢轴向扭转) 由以上两个软件分析结果可知,Midas Gen及Abaqus的分析结果基本一致,一阶屈曲模态为绕工字钢的弱轴,二阶屈曲模态为绕工字钢的强轴,三阶屈曲模态为绕工字钢轴向的扭转屈曲。 微信公众号 ( Wechat Subscription) 欢迎关注 “结构之旅” 微信公众号
坚持实干、坚持一线、坚持积累、坚持思考,坚持创新。
实干、实践、积累、思考、创新。 《有限单元法:编程与软件应用》 曲屈分析 章节的内容节选: 11.1 稳定问题分类 结构失稳(屈曲)是指在外力作用下结构的平衡状态开始丧失,稍有扰动变形便迅速增大,最后使结构发生破坏。稳定问题一般分为两类,第一类是理想化的情况,即达到某种荷载时,除结构原来的平衡状态存在外,还可能出现第二个平衡状态,所以又称平衡分岔失稳或分支点失稳 (Buckling, Bifuraction)(图1中OAB曲线),对应于数学中是求解特征值问题,故又称特征值屈曲,此类结构失稳时相应的荷载称为屈曲荷载。第二类是结构失稳时,变形将迅速增大,而不会出现新的变形形式,又称极值点失稳(Instability)(图1中OCD曲线),结构失稳时相应的荷载称为极限荷载。此外还有一种跳跃失稳(Snap-through)(图1中OEF曲线),当荷载达到某值时(E点),结构平衡状态发生一个明显的跳跃,突然过渡到非临近的另一个具有较大位移的平衡状态(F点),由于在跳跃时结构通常已经破坏,其后的状态不能被利用,所以可归入第二类失稳。 图 11‑1 稳定问题 11.2 最小势能原理 11.2.1 系统的平衡 若系统处于平衡状态,则一定存在一种位移状态,使得系统总势能为驻值,即 (11.2‑1) 公式中 …
[01] Ground Motion Selection (选波) 服务
[02] 著:《PERFORM-3D原理与实例》
[03] 著:《有限单元法-编程与软件应用》
[04] 著:《结构地震反应分析-编程与软件应用》
[05] 著:《有限单元法 Python编程》(New!!!)
[06] 土木工程试验数据处理软件汇总(New!!!)
[07] 自编程序 [Software Box](New!!!)
