[CSI OAPI][编程] CSI OAPI EX2: 基于虚功原理的伸臂桁架几何优化 [Geometric optimization of outrigger truss based on the principle of virtual work]
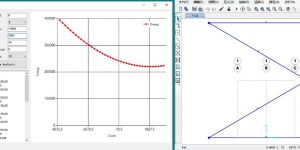
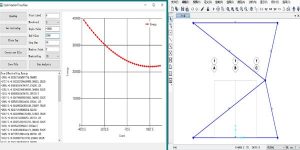
实干、实践、积累、思考、创新。 CSI API编程训练第二课,这次做一个基于虚功原理的伸臂桁架几何优化,主要训练如何通过编程控制SAP2000修改节点位置,自动提交计算分析,并提取构件的内力等。 对于桁架结构,根据虚功原理,结合单位荷载法可知,结构任意一点在指定方向的位移可按以下公式表示: $${\Delta = \sum {\int {\frac{{n{F_N}}}{{EA}}} } {\rm{ds}} = \sum {\frac{{n{F_N}L}}{{EA}}} }$$ 其中,\(n\)为杆件的虚拟轴力,\({F_N}\)为杆件的真实轴力,\(E\)为杆件的弹性模量,\(A\)为杆件的截面面积,\(L\)为杆件的长度。 根据Baker的研究可知,对于静定桁架结构,各杆件处于等应力状态时,结构杆件是最优的。这个最优说的是,对于给定挠度,当所有杆件均处于等应力状态时,所需结构材料用量最小;或者说对于给定材料用量的结构,当所有杆件均处于等应力状态时,结构挠度最小。 假设各杆件的应力水平均达到同一个值,设为\(e = \frac{{{F_N}}}{{EA}}\),此时结构任意一点在指定方向的位移公式变为以下: $${\Delta = \sum {\int {\frac{{n{F_N}}}{{EA}}} } {\rm{ds}} = e\sum {nL} …